Hua-Ta (Eric) Liang is a robotics engineer specializing in autonomous systems, computer
vision, and machine learning. Completing his Master's in Autonomy and Robotics at the
University of Illinois Urbana-Champaign, he has developed full-stack
solutions for autonomous vehicles, UAVs, unmanned surface vessels, and IoT systems.
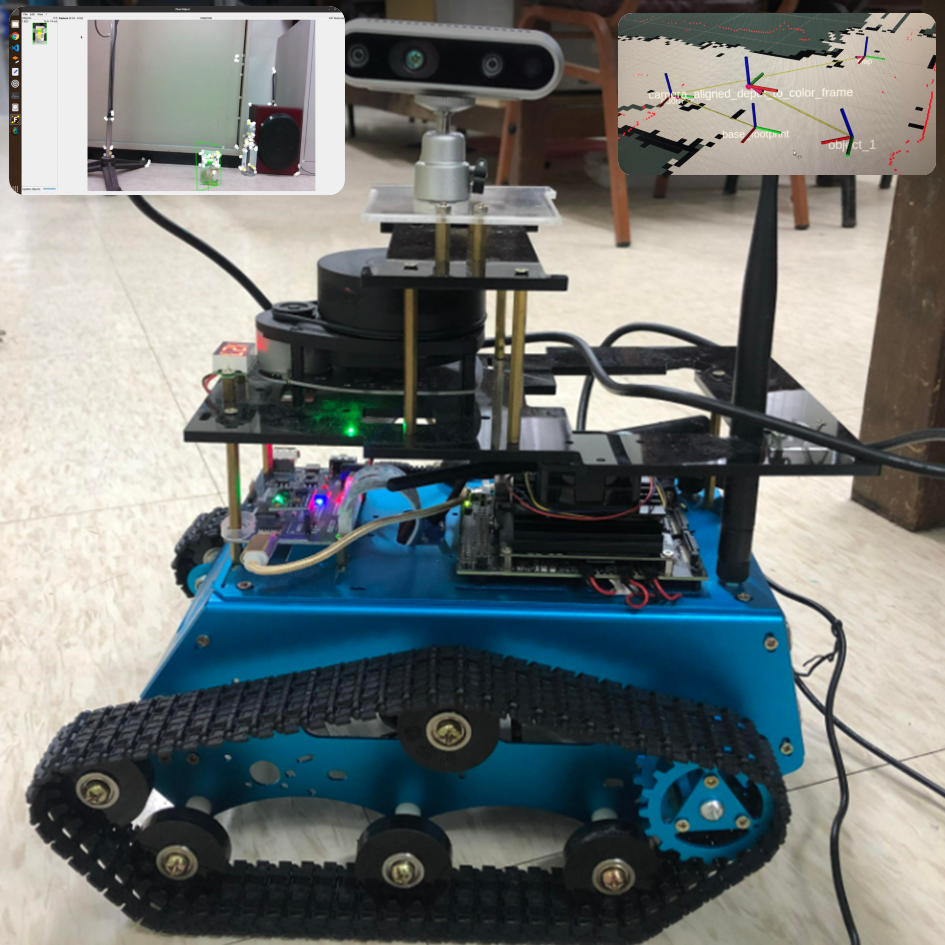
His expertise spans the complete autonomy pipeline: perception (YOLO, Visual SLAM, sensor
fusion), path planning (A*, trajectory optimization), and control (PID, Pure Pursuit,
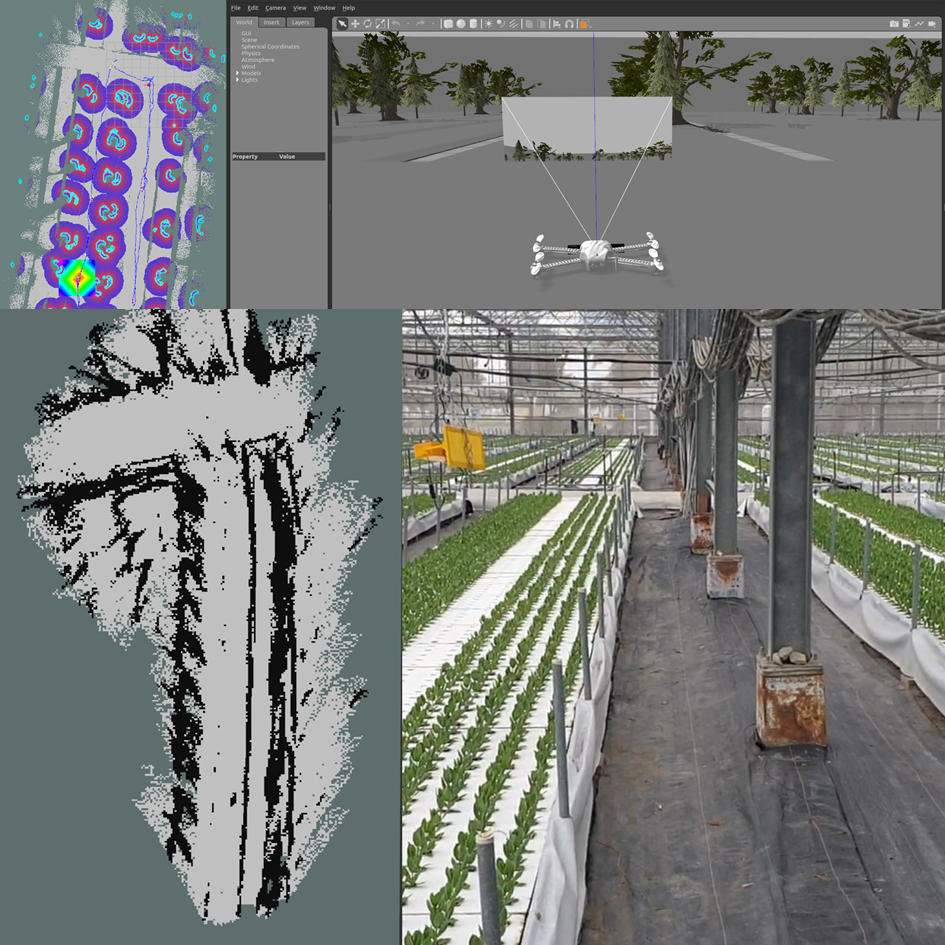
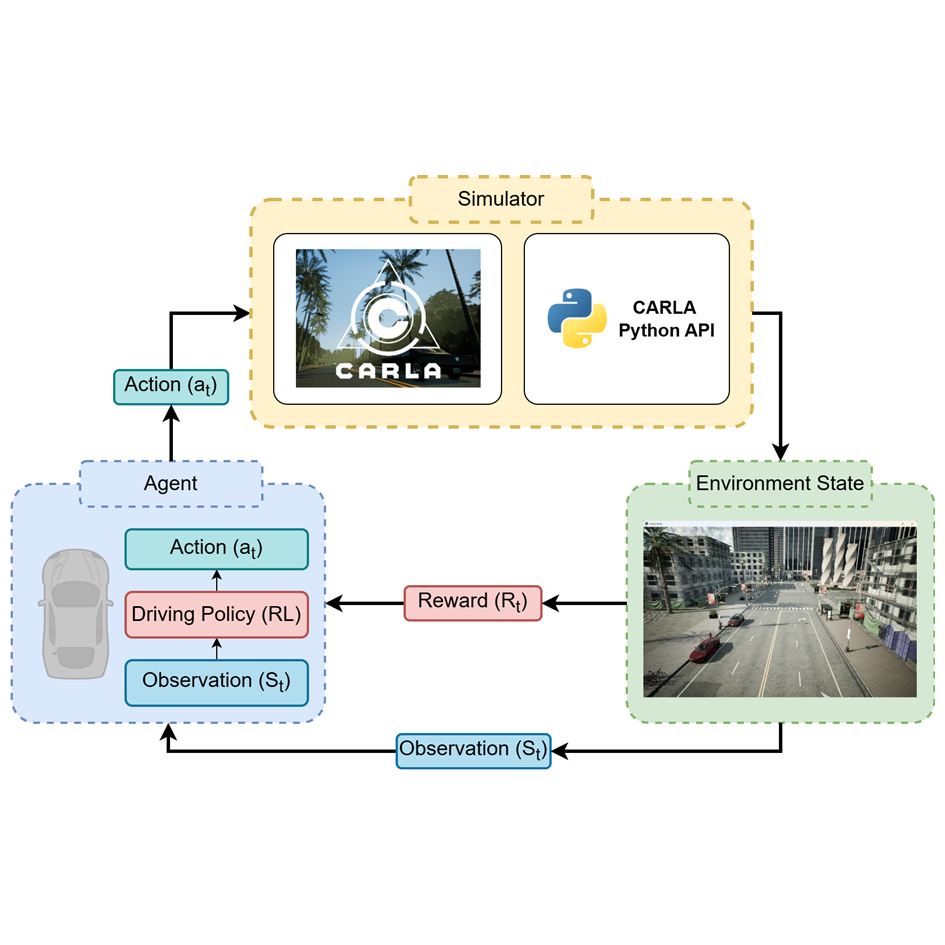
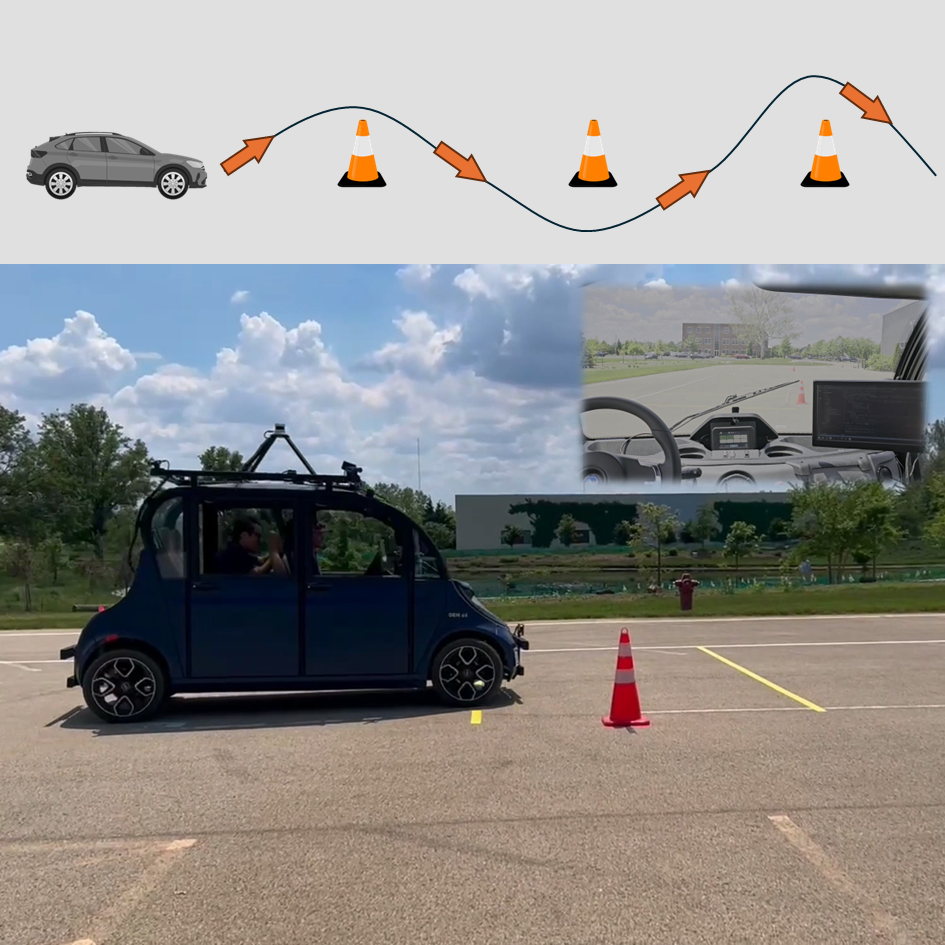
reinforcement learning). Recent projects include vision-based autonomous driving for
full-scale vehicles, a sonar-mapping system for unmanned surface vessels and
a DDQN agent for urban navigation in CARLA.
As a research assistant at National Taiwan University, Hua-Ta built an end-to-end IoT
solution
for dairy cattle health monitoring, integrating IMU sensors, XGBoost models, and PostgreSQL
databases. This work resulted in publications in Smart Agricultural Technology and
the 2023
ASABE International Conference. His undergraduate thesis on building a GPS-denied UAV
navigation earned a fellowship from Taiwan's Ministry of Science and Technology.
Hua-Ta's work demonstrates strong systems integration skills, having successfully deployed
autonomous solutions across diverse platforms from embedded systems to full-scale vehicles.
He is actively seeking opportunities in robotics and autonomous systems where he can
contribute to building reliable, innovative solutions that tackle real-world challenges.